一、动量矩#
1、质点的动量矩#
(1) 对点的动量矩#
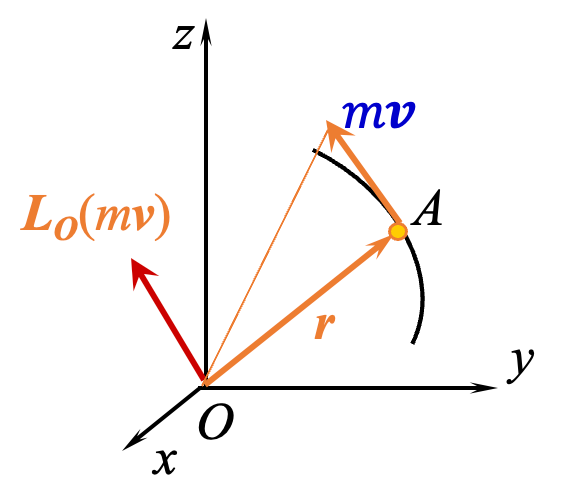
质点A的动量mv对点O的矩,定义为质点A对点O的动量矩:
LO(mv)=r×mvL0(mv)=ixmvxjymvykzmvz=m(yvz−zvy)i+m(zvx−xvz)j+m(xvy−yvx)k(2) 对轴的动量矩#
动量mv对各坐标轴的矩的解析表达式为:
Lx(mv)=y(mvz)−z(mvy)Ly(mv)=z(mvx)−x(mvz)Lz(mv)=x(mvy)−y(mvx)比较对点的动量矩的表达式,可以得到,质点对O点的动量矩在坐标轴上的投影等于质点对相应轴的动量矩。
2、质点系的动量矩#
(1) 对点的动量矩#
质点系内各质点对某点O的动量矩的矢量和,称为这质点系对该点O的动量主矩或动量矩,用LO表示,有:
LO=∑MO(mivi)=∑ri×mmi(3) 对轴的动量矩#
类似的,可以得到质点系对各坐标轴的动量矩表达式:
Lx=∑Mx(mivi)Ly=∑My(mivi)Lz=∑Mz(mivi)3、常见刚体运动的动量矩#
(1) 平动刚体对固定点O的动量矩#
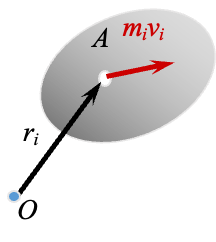
设刚体平移,刚体内任一点A的矢径是ri,该点的质量为mi,速度大小为vi。该质点对点O的动量矩为:
LO(mivi)=ri×mivi从而整个刚体对点O的动量矩为:
LO=∑MO(mivi)=∑ri×mivi因为刚体平移vi=vC,则:
LO=∑MO(mivi)=∑(miri×vC)再一步化简,由mrC=∑miri得到:
LO=mrC×vC=rC×mvC(2) 定轴转动刚体对其转轴的动量矩#
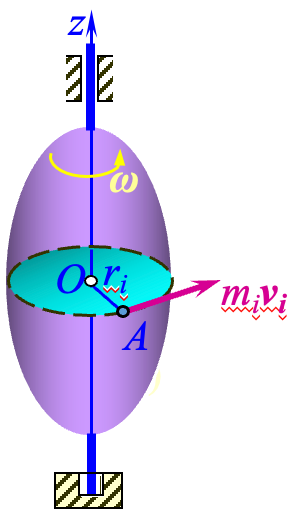
设刚体以角速度ω绕固定轴z转动,刚体内任意一点A的转动半径为ri,速度为vi=riω,方向同时垂直于轴z和转动半径ri,并且指向转动前进的一方。若用mi表示该质点的质量,则其动量对转轴z的动量矩为:
Mz=(mivi)=rimivi=miri2ω从而整个刚体对轴z的动量矩为:
Lz=∑Mz(mivi)=ω∑miri2=ωJz集中Jz为刚体对z轴的转动惯量。
NOTE转动惯量的计算参考:各类刚体的转动惯量
补充回转半径(惯性半径)概念:
ρz=mJz
(3) 平面运动刚体对固定点O的动量矩#
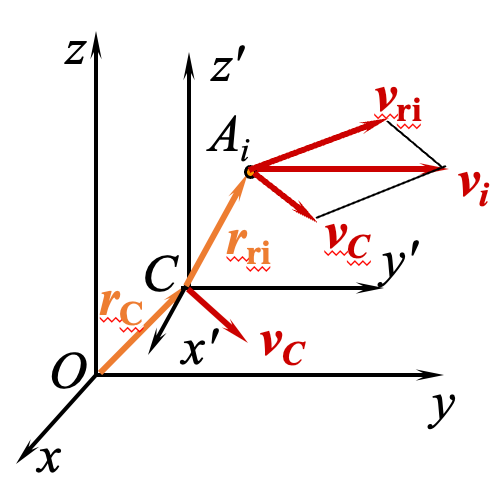
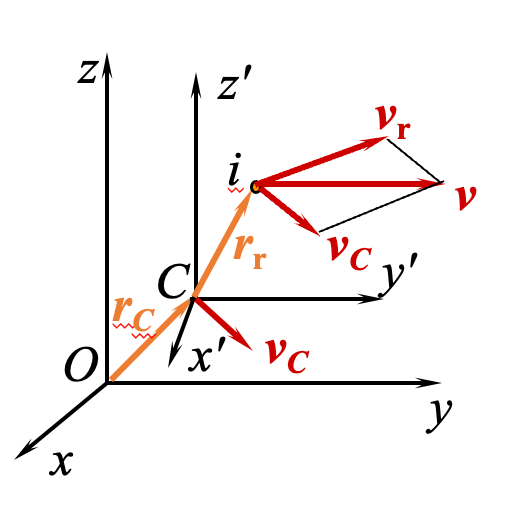
这也是质点系对固定点O的动量矩的另一种表示,过固定点O建立固定坐标系Oxyz,以质点系的质心C为原点,取平移坐标系Cx′y′z′,质点系对固定点O的动量矩为:
LO=rC×mvC+LC其中LC=∑(rri×mivri),指的是质点系相对于质心C的动量矩。
证明:
过固定点O建立固定坐标系Oxvz,以质点系的质心C为原点,取平动坐标系 Cx′v′z′,它以质心的速度 vC运动。设质点系内任一质点Ai在这平移坐标系中的相对速度是vri,该点的绝对速度vi=vei+vri=vC+vri,则质点系对固定点O的动量矩为:
LO=∑(ri×mivi)=∑[(rC+rri)×mi(vC+vri)]=∑(rC×mivC)+∑(rC×mivri)+∑(rri×mivC)+∑(rri×mivri)
上式的第一项化简为:
∑(rC×mivC)=rC×∑mivC=rC×mvC
第二项化简为:
∑(rC×mivri)=rC×∑(mivri)=rC×∑mivrC=0
第三项化简为:
∑(rri×mivC)=∑(mirri)×vC=∑mirrC×vC=0
综上得到结论。
二、动量矩定理#
1、动量矩定理#
(1) 对固定点的动量矩定理#
因为质点系对定点O的动量矩为:
LO=∑(ri×mivi)将其两端求时间的导数,得到:
dtdLO=∑(dtdri×mivi+ri×midtdvi)=∑(vi×mivi+ri×miai)=∑(ri×miai)=∑(ri×Fi)=∑MO(Fi)其中∑MO(Fi)可以分为外力对O点的矩和内力对O点的矩两项,即:
∑MO(Fi)=∑MO(Fi(e))+∑MO(Fi(i))而内力对O点的矩为0,所以得到:
dtdLO=∑MO(Fi(e))令MO=∑MO(Fi(e)),则:
dtdLO=∑MO质点系对某固定点的动量矩随时间的变化率,等于作用于质点系的全部外力对同一点的矩的矢量和(外力对点O的主矩),这就是质点系对定点的动量矩定理。
(2) 对定轴的动量矩定理#
将上式投影到固定坐标轴系上,注意到导数的投影等于投影的导数,则得:
dtdLx=∑Mx(Fi(e))≡MxdtdLy=∑My(Fi(e))≡MydtdLz=∑Mz(Fi(e))≡Mz质点系对某固定轴的动量矩随时间的变化率,等于作用于质点系的全部外力对同一轴的矩的代数和,这就是质点系对定轴的动量矩定理。
2、动量矩守恒定理#
如果作用于质点系的所有外力对某固定点(或固定轴)的主矩始终等于零,则质点系对该点(或该轴)的动量矩保持不变。这就是质点系的动量矩守恒定理,它说明了质点系动量矩守恒的条件。
三、刚体定轴转动微分方程#
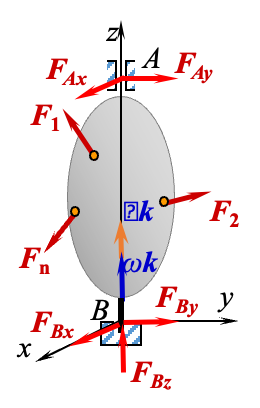
设刚体在主动力F1,F2,⋯,Fn作用下绕定轴z转动,与此同时,轴承上产生了约束力FA,FB。用Mz=∑Mz(F(e))表示作用在刚体上的外力对转轴z的主矩(约束力FA,FB自动消去)。刚体对转轴z的动量矩:
Lz=Jzω于是根据动量矩定理:
dtdLz=Mz可得:
Jzdtdω=Mz考虑到:
α=dtdω=dt2d2φ所以上式可以写为:
Jzdt2d2φ=∑Mz(Fi(e))或:
Jzφ¨=Mz这就是定轴转动的微分方程。即,定轴转动刚体对转轴的转动惯量与角加速度的乘积,等于作用于刚体的外力对转轴的主矩,这就是刚体定轴转动微分方程。
四、相对于质心的动量矩定理#
过固定点O建立固定直角坐标系Oxyz,以质点系的质心C为原点,取平移坐标系Cx′y′z′,质点系对固定点O的动量矩为:
LO=rC×∑mivC+LC其中LC即为质点系相对质心C的动量矩。
1、相对于质心的动量矩定理#
由对定点的动量矩定理:
dtdLo=∑Mo(Fi(e))=∑(ri×Fi(e))有:
dtd(rC×∑mivC+LC)=∑(ri×Fi(e))左边可以进行如下化简:
左边=dtdrC×∑mivC+rC×∑midtdvC+dtdLC=vC×mRvC+rC×mRaC+dtdLC=rC×mRaC+dtdLC右边可以进行如下化简:
右边=∑[(rC+rri)×Fi(e)]=∑(rC×Fi(e))+∑(rri×Fi(e))于是可以将方程化简为:
rC×mRaC+dtdLC=∑(rC×Fi(e))+∑(rri×Fi(e))由质心运动定理:
mRaC=∑Fi(e)所以上式可以化简为:
dtdLC=MC这就是相对于质心的动量矩定理的一般形式。即,质点系相对于质心的动量矩对时间的导数,等于作用于质点系的外力对质心的主矩。
2、相对于质心轴的动量矩定理#
将前面所得质点系相对于质心的动量矩定理,沿着质心轴进行投影,得到:
dtdLCz′=MCz′这就是相对于质心轴的动量矩定理,即,质点系相对于质心轴的动量矩对时间的导数,等于作用于质点系的外力对该轴的主矩。
五、刚体的平面运动微分方程#
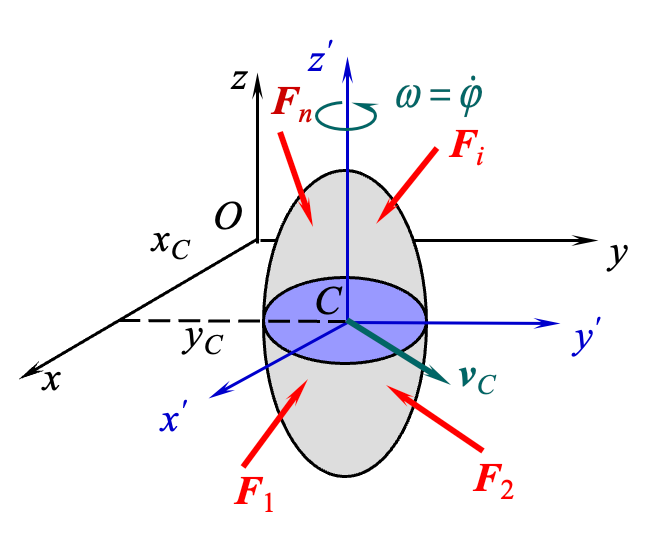
设刚体在外力F1,F2,⋯,Fn作用下作平面运动。取固定坐标系Oxyz,使刚体平行于坐标面Oxy运动,且质心C在这个平面内,再以质心为原点作平移坐标系Cx′y′z′。
由运动学知,刚体的平面运动可分解成随基点(质心)的牵连平移和相对于基点(质心)的相对转动。随质心的牵连平移规律可由质心运动定理来确定:
mRaC=∑F而相对于质心的相对转动规律可由相对质心的动量矩定理来确定:
dtdLC=MC将前一式投影到轴x,y上,后一式投影到Cz′上,可得:
mRaCx=∑FxmRaCy=∑FydtdLCz′=MCz′将上面三个式子进行变形,得到:
mRx¨C=∑FxmRy¨C=∑FyJCz′φ¨=MCz′(F)