一、约束方程与约束分类
1、约束方程
非自由质点系的平衡,可以理解为主动力通过约束的平衡。约束的作用在于:一方面阻挡了受约束的物体沿某些方向的位移,这时该物体受到约束力的作用;而另一方面,约束也容许物体有可能沿另一些方向获得位移。 当质点系平衡时,主动力与约束力之间,以及主动力与约束所许可位移之间,都存在着一定的关系。这两种关系都可以作为质点系平衡的判据。刚体静力学利用了前一种情况,通过主动力和约束力之间的关系表示出刚体的平衡条件。而虚位移原理则将利用后一种情况,他通过主动力在约束所许可的位移上的表现(通过功的形式)来给出质点系的平衡条件。虚位移原理运用动力学的功建立静力学的平衡条件(以动制静);它适合于一些较复杂的平衡问题,避免一些不需求的约束力。因此,在虚位移原理中,首先要研究加在质点系上的各种约束,以及约束所许可的位移的普遍性质。
(1) 约束
对非自由质点系的位置、速度之间预先加入的限制条件,称为约束。
(2) 约束方程
约束对质点系运动的限制可以通过质点系中各质点的坐标和速度以及时间的数学方程来表示。这种方程称为约束方程。
(3) 约束方程例子
-
球面摆
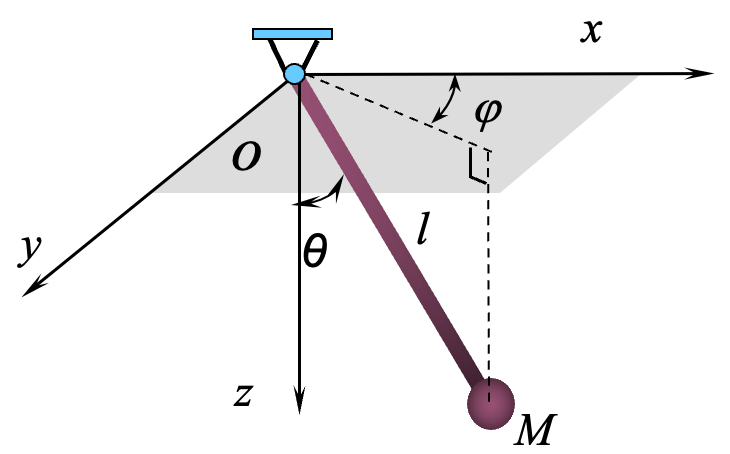 $$
x^2+y^2+z^2=l^2
$$
$$
x^2+y^2+z^2=l^2
$$
-
曲柄连杆机构
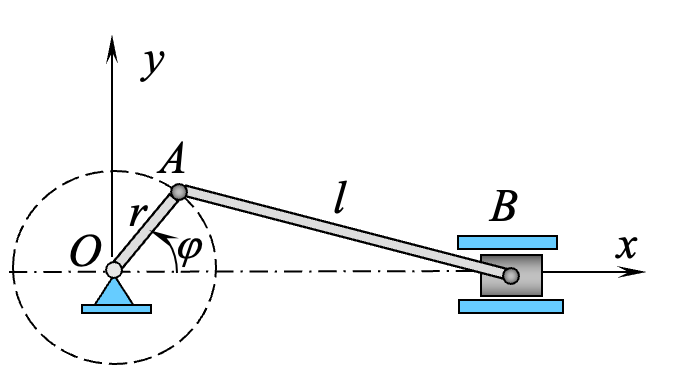 $$
x_A^2+y_A^2=r^2
$$
$$
x_A^2+y_A^2=r^2
$$
2、约束分类
(1) 几何约束与非几何约束
几何约束是用来限制位移的约束,约束方程包含位置坐标,例如滑块与摆。非几何约束是限制运动的约束,例如滚动的轮。
(2) 定常约束与非定常约束
定常约束是不随时间改变的约束,约束方程不含时间变量。非定常约束是随时间变化的约束,约束方程显含时间变量。
(3) 双面约束与单面约束
双面约束是限制两相对方向运动的约束,约束方程为等式。单面约束指限制单方向运动的约束,约束方程为不等式。
(4) 完整约束和非完整约束
完整约束仅限制位移或者可转化成限制位移的约束,约束方程仅包含或可转化成位置坐标以及时间。非完整约束限制位移和其他运动且不可转化的约束,约束方程包含其它运动量且不可转化成位置坐标。
NOTE在理论力学虚位移部分,只研究定常、双面、几何、完整的约束,约束方程形式为:
二、虚位移与虚功
1、虚位移
质点或质点系在给定瞬时约束所允许的任何微小位移,称为质点或质点系的虚位移。虚位移是给定瞬时,约束所许可的任何微小位移,使用表示。
一个被约束在固定曲面上的质点,它的实际位移只是一个,而虚位移在它的约束面上则有任意多个。在定常约束的情况下,约束性质不随时间而变,因此,实位移只是所有虚位移中的一个。
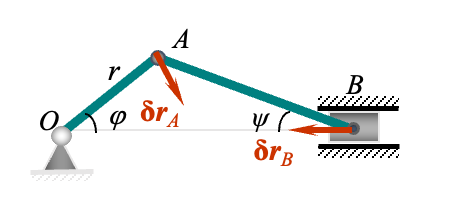
虚位移必须是约束所允许的。图中机构,如果先给A点图示虚位移,那么B点的虚位移就是错的,是约束不允许的。
2、系统虚位移之间的关系
(1) 几何法
在完整定常约束的情况下,实位移与虚位移可相互转化(给定初始条件,实位移是所有虚位移中的一个;通过改变初始条件,任何一个虚位移都可以成为实位移),彼此具有相同的几何性质。注意实位移()正比于速度,也就是说,可通过各点速度间的关系来确定对应点的虚位移关系。在完整定常约束下,虚位移方向沿其速度方向,一刚体上两点的虚位移形式上满足速度投影定理。
(2) 解析法
对于较复杂的系统,各点的虚位移间关系比较复杂,这时可写出约束方程,然后进行变分运算,得到各虚位移间的关系,这种确定虚位移间关系的方法称为解析法。
3、虚功
力在虚位移上所作的功称为虚功,记为。因为虚位移是假想位移,所以虚功也是假想的概念。因为虚位移是微小量,所以虚功计算与元功计算类似。如力在虚位移上所作的虚功为:
一般来说,主动力和约束力都可以作虚功。如果某约束对质点系的约束力在任意虚位移上所作虚功之和恒等于零,则这样的约束称为理想约束。表示为:
三、虚位移原理
1、虚位移原理
具有双面、定常、理想约束的静止质点系,其平衡的必要和充分条件是:所有主动力在任何虚位移上的虚功之和等于零。表达式为:
在实际应用时,常将式写成解析式,得相应的平衡条件,上式称为静力学普遍方程或虚功方程。
部分信息可能已经过时