〇、基本概念
1、平面力系与空间力系
如果作用在刚体上各个力的作用线都在同一平面内,则这种力系称为平面力系,否则称之为空间力系。
2、汇交力系与共点力系
作用在刚体上各力的作用线,如果汇交于一点,则这种力系称为汇交力系。由力在刚体上的可传性知(力对质点是定位矢量,对刚体是滑移矢量),汇交力系中的各力都可在刚体内移到作用线的汇交点,这样就得到共点力系。
3、力偶与力偶系
作用线平行、指向相反而大小相等的两个力称为力偶。由若干个力偶组成的力系称为力偶系。
共点力系和力偶系构成基本力系。
一、共点力系合成的几何法以及平衡的几何条件
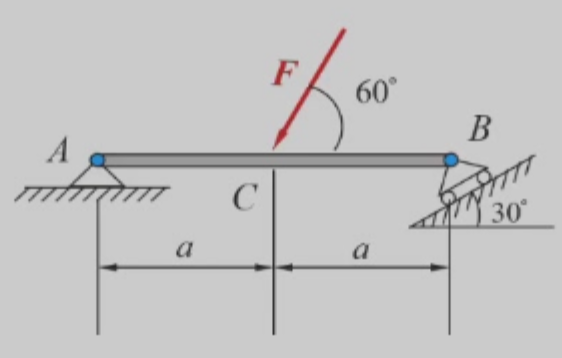
例:水平梁中点作用着力,其大小等于,方向与梁的轴线成角,支承情况如图所示,试求固定较链支座和活动铰链支座的约束力,梁的自重不计。
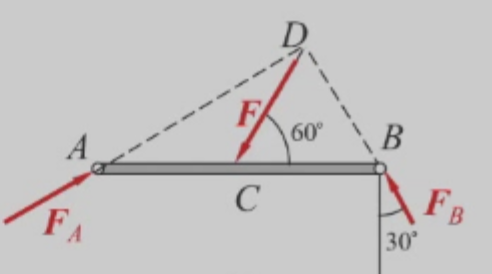
解:(1)取作为研究对象,画出受力图。
(2)应用平衡条件,画出的闭合力三角形并求解
二、力的投影
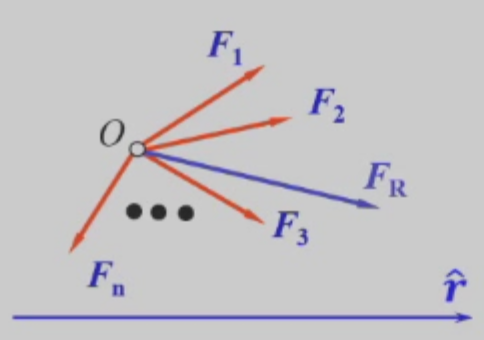
1、合力投影定理
共点力系的合力在任一轴上的投影,等于力系中所有各力在同一轴上投影的代数和。
一个质点收到多个分力作用,合力为。
2、共点力系合成的解析法
将合力投影定理应用于、、轴,可得力系的合力在坐标轴上的投影:
合力的大小
3、共点力系平衡的解析条件
力系中各力在三个坐标轴中每一轴上的投影之和分别等于零。空间共点力系的平衡方程即为:
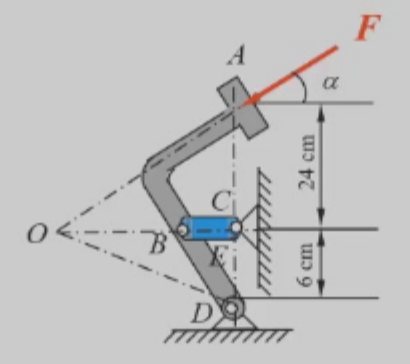
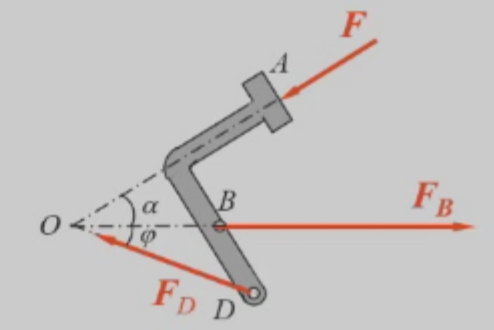
例:如图所示是汽车制动机构的一部分。司机踩到制动蹬上的力,方向与水平面成。当平衡时,水平,铅直,试求拉杆所受的力。已知,(点在铅直线上),又、、都是光滑铰链,机构的自重不计。
解:(1) 几何法
画出受力图和受力三角形,利用正弦定理计算结果。
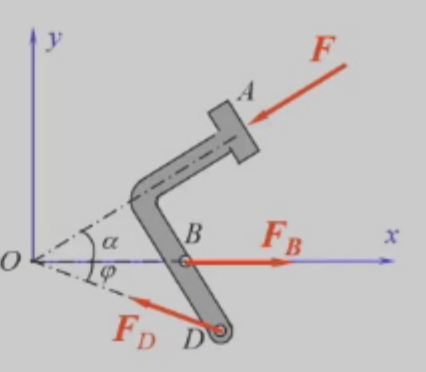
(2) 解析法
列平衡方程:
已知
联立求解,得
三、力偶、力偶矩和力偶的等效条件
1、力偶和力偶矩
(1) 力偶
力偶是大小相等、方向相反,作用线不在同一条直线上的一对平行力(两个力组成的特殊力系)。力偶的作用效果引起物体的转动。力偶中的两个力,既不平衡,也不可能合成为一个力。力偶只能用力偶来代替(即只能和另一力偶等效),因而也只能与力偶平衡。
力偶的三要素:力偶矩的大小、力偶的转向、力偶作用面的方位。
因为力偶的性质,可以使用力偶的转向箭头来代替力偶。
(2) 力偶矩
力偶臂是指力偶中两个力的作用线之间的距离。力偶矩是用来度量力偶对物体的转动效应的物理量。力偶中任何一个力的大小与力偶臂的乘积,加上适当的正负号。平面力偶矩可视为代数量。即:
力偶矩正负规定:若力偶有使物体逆时针旋转的趋势,力偶矩取正号反之,取负号。
在几何上,力偶也可以用对应三角形的面积的两倍来表示,即:

力偶对任意一点取力矩都等于力偶矩,不因矩心的改变而改变。
(3) 力偶和力偶矩的特性
-
力偶中的两个力,既不平衡,也不可能合成为一个力。
-
空间力偶是一自由矢量。1
-
力偶对任一点取力矩都等于力偶矩,不因矩心的改变而改变。例如:
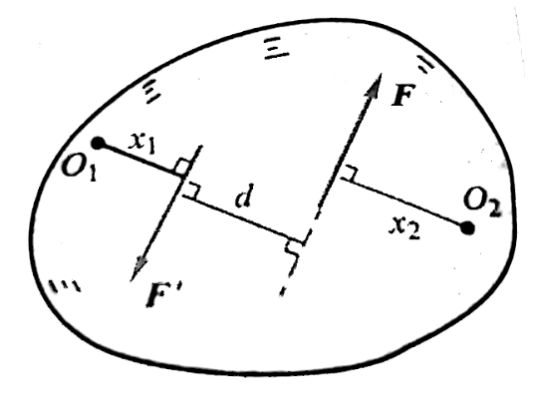
对的矩
对的矩
-
同平面内或平行平面内力偶的等效条件:作用在刚体内同一平面内或平行平面内的两个力偶相互等效的充要条件是二者的力偶矩代数值相等(力偶矩相等)。
-
空间力偶的作用面可以平行移动,而不改变力偶对刚体的作用效果。
-
力偶可以在同平面内任意移转,而不改变力偶对刚体的作用效果。
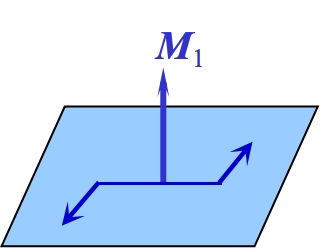
2、力偶矩矢
力偶矩矢是用来表示力偶矩的大小、转向、作用面方位的有向线段。空间力偶可以用一个矢量表示,该矢量成为力偶矩矢。
矢量的模表示力偶矩的大小;方位垂直于力偶作用平面;指向表示力偶的转向,符合右手螺旋定则。
空间力偶的等效定理:空间两个力偶等效的充要条件是:这两个力偶的力偶矩矢相等。
四、力偶系的合成与平衡条件
1、力偶系的合成方法
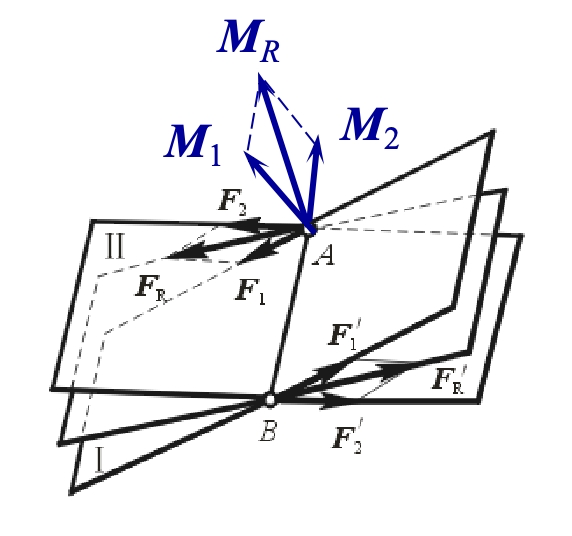
空间力偶系可合成为一力偶。合力偶的矩矢等于各分力偶矩矢的矢量和,即:
证明:
和分别为作用平面I和II内的力偶。
点:;点:
由于,故。
合成结果为一个合力偶(,)。
求合力偶矩矢。
即力偶矩矢是按平行四边形定则相加。设力偶系由任意个力偶组成,则有:
对上面的证明过程进行拓展,上式投影到直角坐标轴上,得:
即合力偶矩矢在某一轴上的投影,等于它的各分力偶矩矢在同一轴上投影的代数和。如果已知合力偶矩矢的三个投影,可由下式确定合力偶矩矢的大小和方向:
2、力偶系的平衡条件
力偶矩矢多边形自行闭合,即力偶系中各力偶矩矢的矢量和等于零,即:
空间力偶系的三个平衡方程:
平面力偶系的平衡方程只有一个。所以平面力偶系平衡的充分必要条件可以简化为力偶系所有各力偶的代数和等于零。
Footnotes
-
固定矢量:起点和终点都固定在空间的某一特定位置。滑移矢量:滑移矢量的大小和方向固定,但其作用点可以沿着作用线任意移动。自由矢量:只规定大小和方向,不限制其在空间中的起点位置。 ↩
部分信息可能已经过时